Australian Centre for Field Robotics
Visiting Researcher
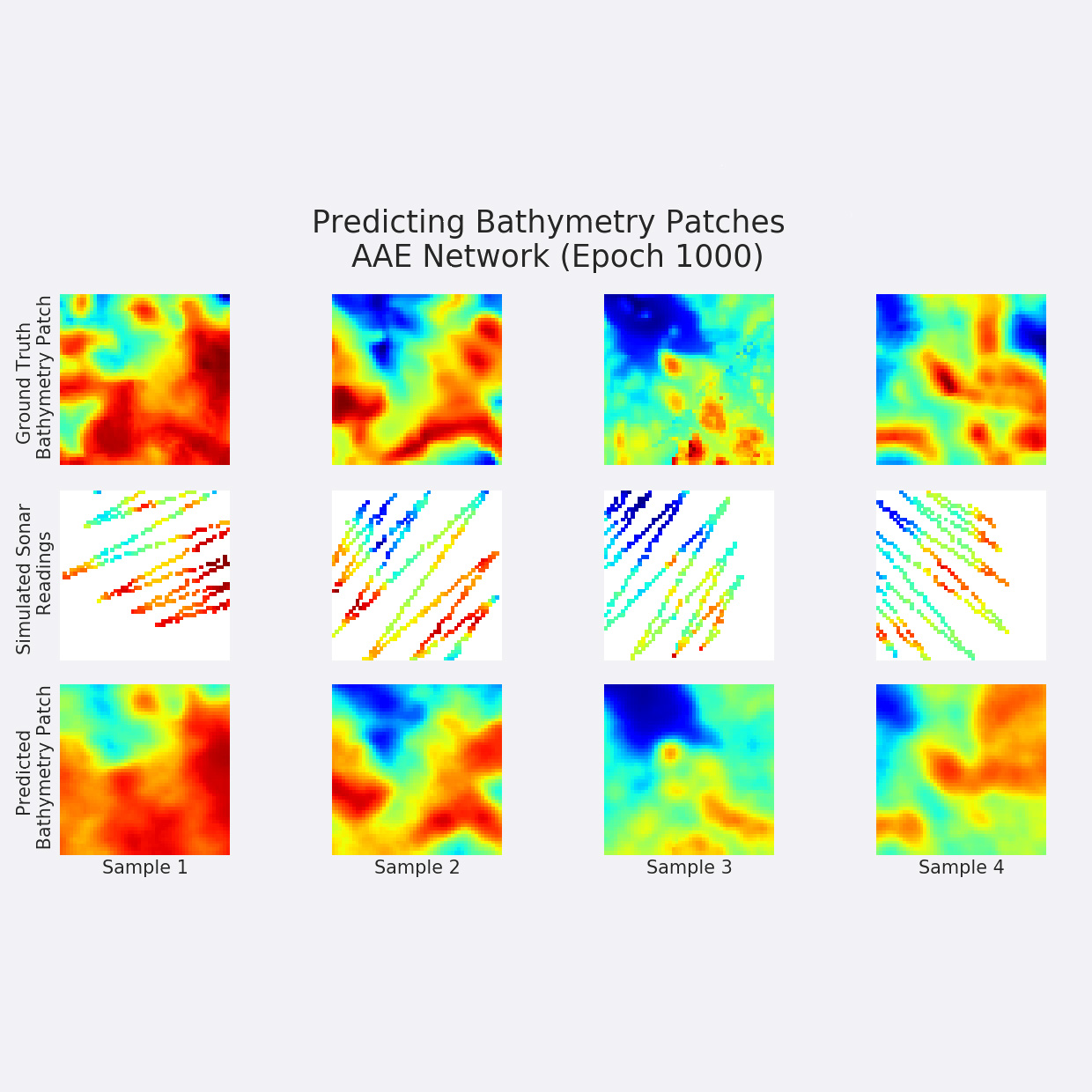
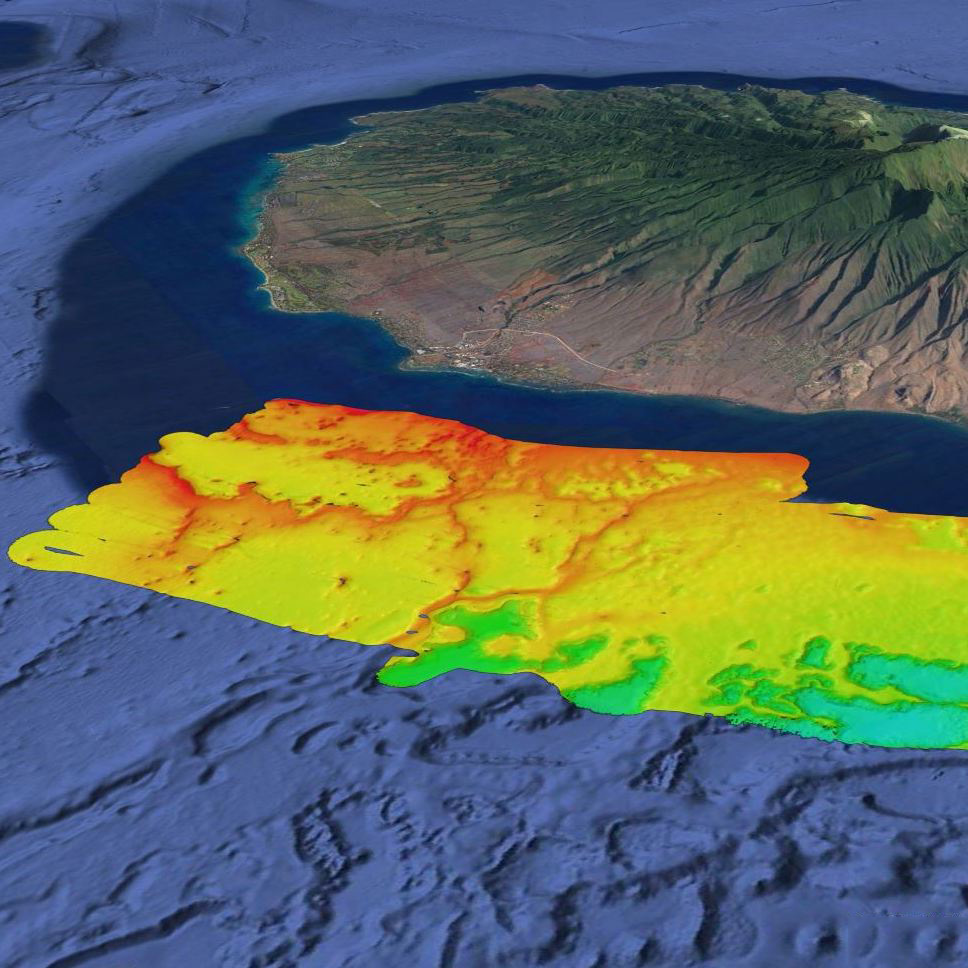
With ACFR, I implemented a Generative Adversarial Network (GAN) machine learning architecture to make bathymetry predictions given sparse sonar readings, a prediction problem similar to image inpainting. To improve learning, I generated large sets of training data by simulating vehicle dynamics and sonar measurements.
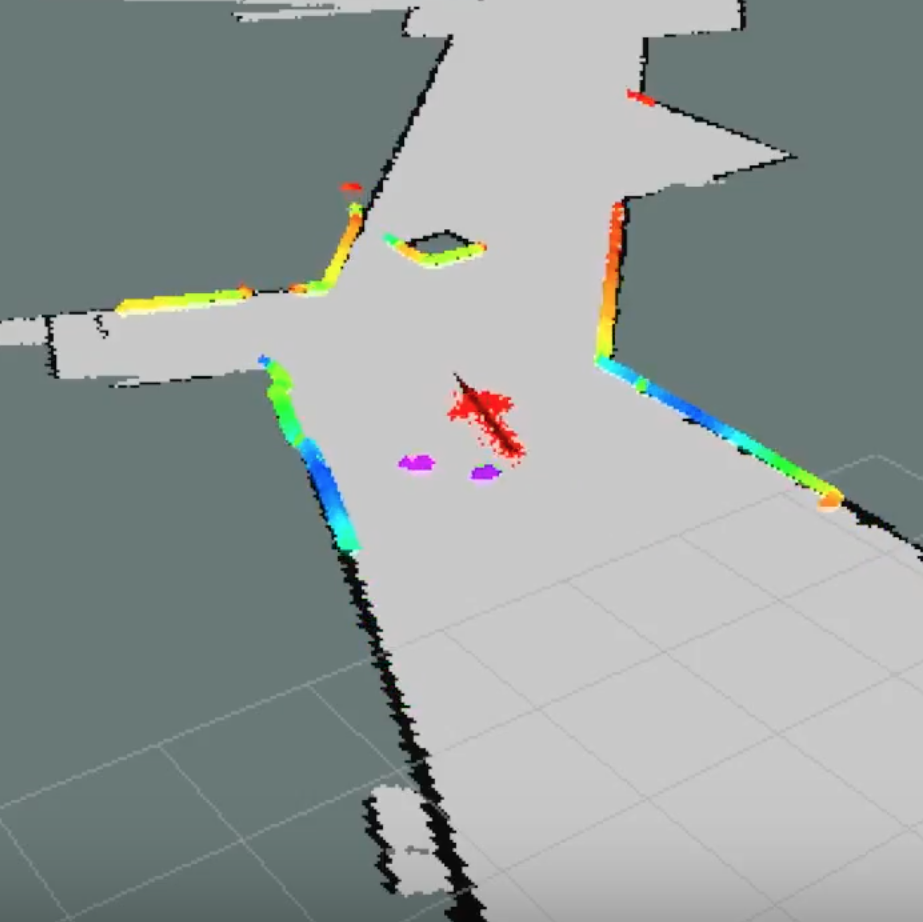
Computer Science and Artificial Intelligence Laboratory
Undergraduate Researcher
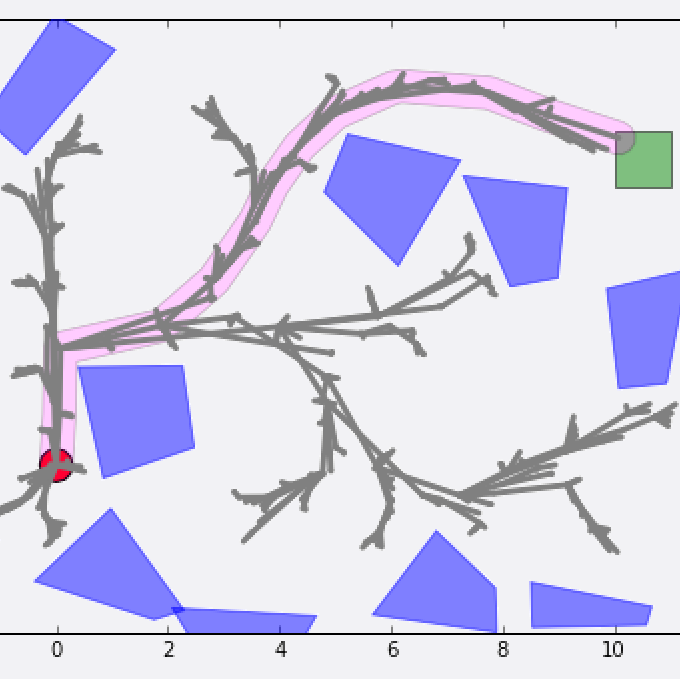
With CSAIL, I helped deploy an array of AUVs off the coast of the Hawaiian Islands to demonstrate human-robot interaction, multi-agent execution, and adaptive sampling techniques in a challenging ocean environment. Contributing to these efforts, I developed energy-aware path planning capabilities using a chance-constrained MDP framework.
Woods Hole Oceanographnic Institution
Summer Research Fellow
With WHOI, I created a graphical user interface to monitor the battery state of the Slocum Glider vehicle. To take advantage of the long-endurance capability of the Slocum Gliders, I performed vehicle range analysis for different power mode scenarios and ocean current conditions. From the hardware perspective, I also designed and built the internal battery pack chassis to increase strength and decrease weight for the glider.
Northrop Grumman
Systems Integration, Test, and Evaluation Engineer
With Northrop Grumman, I programmed a Google Earth visualization tool that displays flight data from the Global Hawkaircraft by assimilating and synchronizing state variables across multiple data files. Along with developing a flight visualization tool, I also operated software and hardware components of the Global Hawk in order to conduct systemand subsystem level testing for segment integration.
Man Vehicle Laboratory
Undergraduate Researcher
With MVL, I assessed the accuracy of the Enhanced Dynamic Load Sensor for the International Space Station (EDLS-ISS), a platform used for strength training in microgravity environments. To do so, I extracted motion data from test subjects performing various weightlifting movements while undergoing microgravity via NASA’s parabolic flight program to develop a musculoskeletal model.
Hong Kong University of Science and Technology
Undergraduate Researcher
With HKUST, I analyzed protein localization in yeast cells to identify novel protein pathways in retrograde transport. While doing so, I learned common wet lab operations such as cell transformations, DNA extractions, and PCR amplifications.